
机器之心发布
在南加州大学,王越的 PSI Lab(Physical Superintelligence Lab)是昔日两三年里具身智能方进取升最快的年青团队之一。
王越 2022 年从 MIT EECS 博士毕业,毕业前曾在 NVIDIA 自动驾驶询查组作念询查科学家;2023 年入职 USC 策划机系任助理教会,并随即创办 PSI Lab。读博时间,他曾取得 2020 年 NVIDIA Graduate Fellowship;任教之后,又陆续取得 Toyota Young Faculty Researcher、Powell Faculty Fellowship 等荣誉。
他的早期代表作包括点云领会经典使命 DGCNN、DCP,以及自动驾驶 3D 感知方法 DETR3D。其中,DGCNN 是点云深度学习里绕不开的一篇论文,也始终位列 ACM Transactions on Graphics 高援用论文前线。
PSI Lab 建树地间不长,但学生团队的产出密度很高。昔日两三年,组内学生还是拿到 NVIDIA Fellowship、Qualcomm Fellowship、Capital One、Annenberg、Amazon 等多项奖学金和询查资助,本科生也取得过 CRA 隆起本科询查者关系荣誉。对一个年青实验室来说,这么的获奖和产出密度并不常见。
这条旅途也解说了 PSI Lab 的位置:它不是从纯 CV 短暂转向机器东谈主,也不是只作念逝世,而是站在 3D 天下领会、物理天下感知和着实机器东谈主任务的交叉点上。实验室目前的标的遮盖东谈主形机器东谈主、聪敏操作、从东谈主类视频学习机器东谈主政策,以及面向着实部署的数据和学习系统。
PSI Lab 主页
在本年 CVPR 2026 的具身智能 Workshop 上,王越指导的 PSI Lab 和团结者连气儿拿下三项奖。
Psi-0 拿了 3D-LLM/VLA Workshop 的 Best Paper,PhysWorld 则是统一个 Workshop 的 Best Paper Runner-up,Humanoid Everyday 也拿到 Embodied AI Workshop (EAI) 的 Best Paper。三篇之后也都进了各自标的的主会:Psi-0 被 RSS 2026 委派,PhysWorld 和 Humanoid Everyday 均被 ICRA 2026 委派。
它们碰劲落在东谈主形机器东谈主现时最缺的三个步履。Humanoid Everyday 处治的是数据 —— 灵通天下里东谈主形机器东谈主的日常操作数据,以及配套的评测基准;Psi-0 往上一层,要考试一个能迁徙到东谈主形身体上的基础行动模子;PhysWorld 再往前一步,让模子不啻” 看懂” 目下的天下,还能推测一个行动作念下去之后、天下会变成什么样。
淌若把东谈主形机器东谈主当成一个需要始终搭建的系统,而不是一次性的 demo,这三件事其实串成了一条相对圆善的旅途:先拿到敷裕着实、敷裕千般的数据,再用这些数据训出能落到机器东谈主身体上的基础模子,临了让模子具备对行动后果的推测材干。
王越西宾
Psi-0:东谈主形机器东谈主的基础模子框架
Psi-0 的全称是 Ψ₀:An Open Foundation Model Towards Universal Humanoid Loco-Manipulation。
Loco-manipulation,指的是挪动和操作结合在一齐的任务。比如推车、寄递、倒水、清洁、滚水龙头、拉椅子。机器东谈主不是固定在桌前抓取一个物体,而是要搬上路材、协调双臂和手部行动,并在长程任务中陆续处理场景情状变化。

这类任务更接近东谈主形机器东谈主畴昔要面对的着实应用,也比桌面操作更复杂。
一个径直的问题是:东谈主形机器东谈主基础模子应该用什么数据考试。
昔日一种想路,是把东谈主类视频、机器东谈主轨迹和其他多模态数据放在一齐考试。但东谈主和机器东谈主并不是统一个 embodiment。东谈主的手臂长度、要道范围、手指无邪性、通顺形状,都和东谈主形机器东谈主不同。东谈主类视频中包含丰富的操作训诫和物体交互过程,但它们不可径直等同于机器东谈主可奉步履作。
Psi-0 接纳的是分阶段考试。
第一步,用约 829 小时 EgoDex 第一东谈主称东谈主类视频作念预考试。第一东谈主称视频更接近操作发生时的视角,能够提供手如何接近物体、物体如何被挪动、视线如何随行动变化等东谈主类操作先验。这里学习是平方的视觉、交互和任务过程先验。
并且这类数据自然易于界限化:不靠遥操作、也不需要挑升收罗开拓,一部头戴相机以致一部手机就能录,量级高大于真机示教数据。
第二步,用约 31 小时 Humanoid Everyday 东谈主形机器东谈主轨迹作念后考试。这个阶段的作用,是把预考试阶段学到的操作和交互先验,进一步对都到东谈主形机器东谈主的身体结构、行动空间和着实逝世拘谨上。
第三步,再用极少贪图任务数据作念适配。模子不是为每个任务从零启动学习,而是在已有的东谈主类视频先验和东谈主形机器东谈主行动材干基础上,赓续养息到具体任务。
因此,Psi-0 关怀的不是浮浅扩大机器东谈主数据界限,开运体育中国官网入口而是如何组织不同开头的数据。东谈主类第一视角视频提供界限化的操作先验,着实东谈主形机器东谈主轨迹提供 embodiment 对都,极少贪图任务数据完成具体适配。
这篇使命的意旨在于,它把东谈主形机器东谈主 foundation model 的考试问题,拆成了更清亮的阶段:先从东谈主类数据中学习可迁徙的交互先验,再通过机器东谈主数据把这些先验落到可奉步履作上。
不是把所少见据径直混在一齐,而是让东谈主类视频和机器东谈主轨迹在不同阶段承担不同脚色。
PhysWorld:天下模子启动细致物理
PhysWorld 的论文名是 Robot Learning from a Physical World Model。
在机器东谈主语境里,天下模子关怀的是:给定现时情状和可能的行动,天下接下来会如何变化。
昔日一年,许多天下模子使命东要以视频推测或视频生成的体式出现。给定一张图、一个任务提示,模子生成一段畴昔视频。视频越领会、越着实,相通越像是在 “领会天下”。
但对机器东谈主来说,视觉上合理还不够。
牛牛棋牌游戏2026中国最新版官网一个视频模子不错生成 “手把杯子推走” 的画面,但这不等于它还是掌捏了机器东谈主信得过需要的物理信息:杯子的位姿如何变化,战役点是否成立,摩擦和撑持关系是否合理,生成的通顺能不可由机器东谈主我方的身体奉行。
PhysWorld 处理的恰是这个中间步履。它不是把天下模子停在畴昔视频生成上,而是尝试把视频生成、物理天下重建和机器东谈主政策学习联结起来。
经过不错拆成三步:先给定图像和任务提示,生成任务关系视频;再从视频中重建背后的物理天下,造成以物体为中心的场景默示;临了通过 object-centric residual reinforcement learning,把视觉推测进一步转移为机器东谈主可奉行的轨迹。
这里的 object-centric,指的是围绕物体来组织场景和行动信息。机器东谈主操作里,信得过伏击的频繁不是整张图,尊龙凯时官网而是贪图物体的位置、姿态、通顺,以及它和机器东谈主、桌面、其他物体之间的战役关系。
Residual RL 不错领会成在已有视觉教悔的基础上,再通过强化学习作念物理层面的修正,让行动更安妥机器东谈主能源学和环境拘谨。
是以,PhysWorld 信得过关怀的不是视频质地本人,而是 physical actionability:天下模子推测出来的畴昔,能不可进一步转成机器东谈主可奉行的轨迹。
淌若一个天下模子只可生成视觉上合理的畴昔,它主要如故一个生成模子;只好当这些推测能够参加机器东谈主考试和逝世链路,它才启动接近机器东谈主信得过需要的天下模子。
Humanoid Everyday:灵通天下东谈主形操作的数据与评测底座
Humanoid Everyday 是一个面向灵通天下东谈主形操作的数据集和评测平台,全称是 A Comprehensive Robotic Dataset for Open-World Humanoid Manipulation。
它关注的是东谈主形机器东谈主学习里一个基础问题:如何构建遮盖着实场景、复杂任务和多模态感知的数据基础设施。
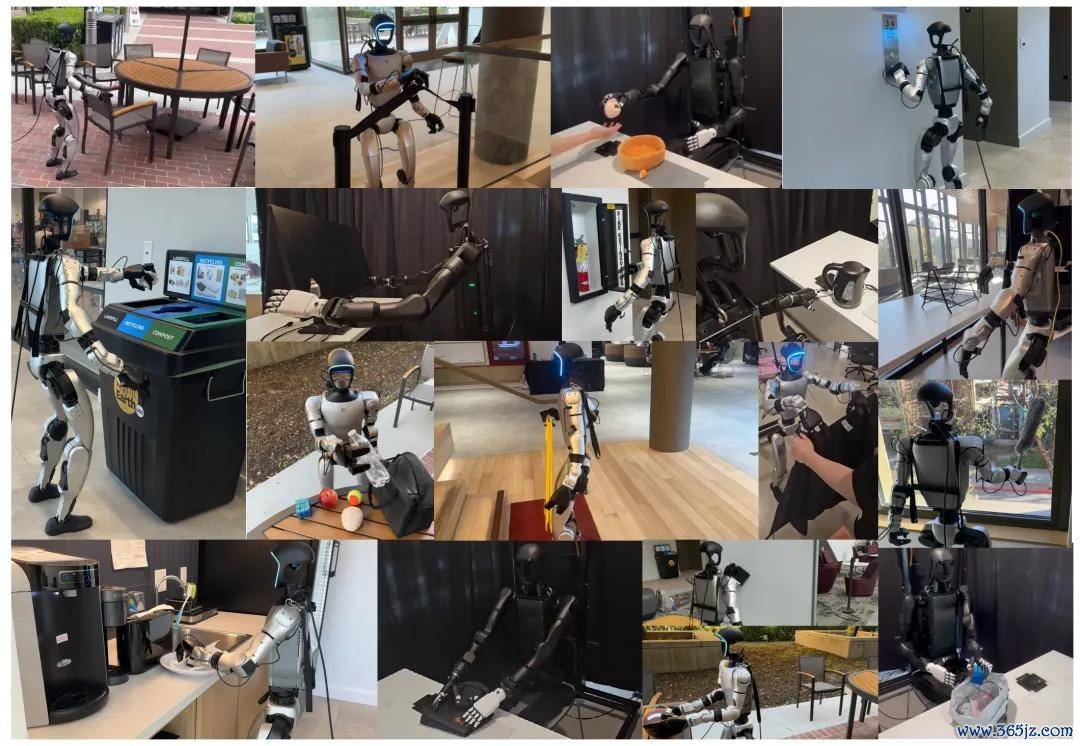
比较固定机械臂和桌面操作任务,东谈主形机器东谈主面对的是更灵通的任务缔造。它不仅要感知物体,还要协调身体、双臂和挪动材干,在家庭、办公、工业等日常环境中完成长程、战役丰富的操作任务。挪动后操作、搬运、器具使用、柔性物体操作、搭钮物体操作、东谈主机交互和高精度操作,都属于这类问题。
Humanoid Everyday 在这个布景下提议。数据集遮盖 260 个任务、7 类任务、1.03 万条轨迹、升迁 300 万帧数据,模态包括 RGB、深度、LiDAR、触觉和当然话语标注。它不仅提供考试数据,也提供云表评测平台,让不同方法不错在谐和逝世环境中部署和评估。
云表评测平台是这项使命的一个伏击部分。
机器东谈主学习始终濒临一个评测艰难:不同论文相通使用不同机器东谈主、不同环境、不同物体和不同任务界说,方法之间很难径直比较。关于灵通天下东谈主形操作,这个问题会更明显,因为任务本人包含挪动、战役、双臂协同和长程奉行,任何环境各异都可能影响收尾。
范例化评测的意旨,是为模子材干提供一个更领会的比较坐标。它让询查者不仅仅展示某个政策在特定场景中的证明,而是能够在谐和任务和逝世缔造下,比较不同方法的泛化材干、鲁棒性和奉行成果。
因此,Humanoid Everyday 的价值不仅仅数据界限,而是把灵通天下东谈主形操作放进一个可考试、可评测、可复现的询查框架里。
它是东谈主形机器东谈主基础模子考试中很要害的一层:面向着实日常任务的多模态数据集,以及不错陆续比较模子材干的评测基础设施。
数据、模子、天下推测,被放进统一条链路
Humanoid Everyday 更接近数据基础设施。它关怀的是:淌若要考试灵通天下中的东谈主形机器东谈主操作材干,着实、可复现、可评测的数据从那处来。
Psi-0 更接近基础模子框架。它关怀的是:东谈主形机器东谈主能否先从大界限东谈主类第一视角视频中学习操作先验,再通过着实东谈主形机器东谈主数据完成后考试,从而取得更可迁徙的挪动操作材干。
PhysWorld 则把问题鼓舞到天下模子。它关怀的是:天下模子生成的畴昔,能否进一步转移为机器东谈主可奉行的轨迹,而不仅仅停留在视觉上合理的视频推测。
这三篇使命的对象不同,但不错放进统一个问题链条里领会:
数据如何构建。材干如何学习。行动后果如何被推测和诈欺。
这亦然东谈主形机器东谈主比较一般 VLA 任务更复杂的地点。机器东谈主不是只在图像和话语之间确立对应关系,也不是浮浅输出一个行动 token。它要在着什物理环境中挪动、战役、养息姿态,处理物体、地形、身体拘谨和长程任务中的罪行积聚。
因此,对东谈主形机器东谈主来说,单纯扩大端到端模子界限,未必能遮盖全部问题。更伏击的是,数据、模子考试和物理天下推测之间能否造成有用配合。
从这个角度看,Humanoid Everyday、Psi-0 和 PhysWorld 阔别落在这条链路的不同位置。它们莫得给出一个单一谜底,而是共同指向一个更系统的问题:东谈主形机器东谈主基础材干的造成,可能需要数据底座、机器东谈主原生模子和物理天下推测一齐鼓舞。
两个判断
第一个判断:东谈主形机器东谈主需要一套为它再行想象的基础模子框架 —— 这里包括预考试、后考试、部署等步履。
机器东谈主要处治的问题,和 VLM、天下模子现实上并不是一趟事。后者的落点是领会和生成,机器东谈主最终要的,是在物理天下里把一个行动作念对、作念完。把话语或视觉模子那套范式径直搬过来,未必率分歧身,更值得作念的是一套 robotics-native 的基础模子,每个步履都按机器东谈主我方的需求来想象。
Psi-0 的阶梯,便是先从东谈主类视频里学先验,再用机器东谈主数据落地。这个判断不会只出目前 Psi-0 里。EgoScale、DreamDojo 这些标的也都在指向统一件事:机器东谈主必须先向东谈主类数据借力,再想见解跨过 embodiment gap。
第二个判断:天下模子最伏击的问题不是视频质地,而是物理可奉行性。
淌若天下模子仅仅在比谁生成的视频更清亮、更长、更领会,那它离机器东谈主还差一步。机器东谈主需要的不是漂亮视频,而是可奉行的畴昔:杯子会不会滑,战役点对不对,物体会不会翻倒,行动能不可由机器东谈主我方的身体完成,这些才是信得过决定任务成败的问题。
PhysWorld 指向的恰是这个悬而未决的问题:天下模子生成的畴昔,能不可参加逝世闭环。换句话说,天下模子对机器东谈主信得过有用的时候,不是它生成了一段好意思瞻念的视频,而是它能匡助机器东谈主判断下一步如何作念。
这亦然王越团队这组三篇使命的中枢端倪。Humanoid Everyday 处治数据从那处来,Psi-0 处治东谈主形机器东谈主的基础行动材干如何学,PhysWorld 处治行动之后的物理后果如何推测。三篇放在一齐看,它们不是在讲一个更大的端到端模子,而是在搭一条更圆善的链路。
东谈主形机器东谈主的基础材干,可能不会只来自模子界限的赓续放大。它更可能来自数据底座、机器东谈主原生模子和物理天下推测之间的系统闭环。
Psi-0 名目页:https://psi-lab.ai/Psi0/
PhysWorld 论文:https://arxiv.org/abs/2511.07416
Humanoid Everyday 名目页:https://humanoideveryday.github.io/
PSI Lab 实验室:https://psi-lab.ai/
文中视频辘集:https://mp.weixin.qq.com/s/yWKGcFKVgXbJGUSb77J9Yg尊龙凯时2026世界杯中国官网